Since I started getting into the field of robotics and autonomous systems, I’ve heard of the term SLAM many times. SLAM in robotics stands for Simultaneous Localization and Mapping, and it consists of a set of algorithms to construct and constantly update the map of an environment that is unknown to the robot while tracking the robot’s position within that map.
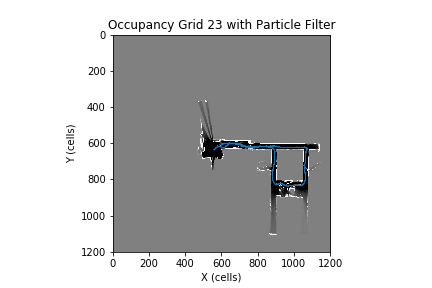
To understand how it works, I am coding it from scratch. I got the algorithm working, but it is quite slow at the moment. This makes sense because I’m using a fine resolution of 0.05 meters. The next step is to optimize it to be faster and more accurate. Check the picture above for a sneak peak of the results I’m getting at the moment using SLAM with a Particle Filter (PF) of N = 50 particles, and stay tuned for the final results of the project!





